
The Human–Robot Intersection
By Rakhi Rajani and Jen Blank


Authors’ note: This essay adapts a peer-review-style analysis of human–robot interaction into long-form public writing. We retain its technical grounding while writing for readers who are shaping, or already living inside, the near future of human–machine collaboration.
The future arrived quietly
A few decades ago, asking “Can I trust this robot with my life?” would have sounded like science fiction. Today, surgeons collaborate with robotic assistants, autonomous vehicles navigate public roadways, and robotic explorers conduct scientific investigations on other planetary bodies.
Photo by Erhan Astam on Unsplash
Human–robot interaction (HRI), the multidisciplinary field that studies how humans and robots work together, has evolved from a niche research area into a foundational component of contemporary robotics and AI. Yet despite this rapid progress, public discourse often frames the shift as a contest: humans versus machines.
That framing is misleading. The more productive question is not whether machines will replace us, but what happens if we prioritise creating a future in which machines join the team instead.
At its core, HRI is concerned with understanding and optimising interactions between humans and robotic systems, whether those systems operate beside us or millions of kilometres away. Crucially, this endeavour is not primarily about robots at all. It is about artificial intelligence at the intersections: between human cognition and machine computation, between empathy and automation, between uncertainty and precision.
This essay explores how those intersections are forming, where they succeed, where they fail, and why the near term, not the distant future, is where the most consequential design decisions are being made.
A note on terminology: the established field is called human–robot interaction (HRI), but the more precise question animating this essay is human–robot collaboration (HRC). Interaction encompasses any exchange between humans and robots, from a one-off voice command to a passing encounter with a delivery bot. Collaboration implies something more: shared goals, distributed responsibility, mutual adaptation over time. Much of what follows is about what it takes to move from interaction to genuine collaboration.
From science fiction to shared work
The idea of close human–machine interaction originated in speculative fiction long before it became operational reality. Early industrial robots of the 1960s and 1970s were powerful, fast, and utterly oblivious to their surroundings. For safety, they were physically isolated from human workers.
As robots began to leave those cages and enter shared environments, researchers recognised that task execution alone was insufficient. Interaction required communication, adaptation, and shared understanding. HRI emerged as a distinct research field in the early 2000s, drawing on human–computer interaction, robotics, psychology, and design.
A telepresence robot on Mars, operating under communication delays of tens of minutes, faces fundamentally different interaction constraints than a collaborative robot working beside a human on a factory floor. Yet both are shaped by the same underlying question: how much should the robot decide, and how much should the human remain responsible for?
By the 2020s, HRI had moved decisively out of the laboratory. Collaborative robots entered manufacturing. Service robots appeared in homes, schools, and care settings. Autonomous systems began operating in public spaces.
The current state is one of cautious but progressive integration. Robots are no longer just tools we program. They are becoming teammates, partners, and caregivers across diverse domains.
Why we treat robots like people
One of the most consequential dimensions of HRI is psychological: how humans perceive, respond to, and develop affective relationships with robots.
Humans have a pronounced tendency toward anthropomorphism, attributing human-like qualities to non-human entities. Research consistently shows that we respond socially to robots, forming positive affective reactions as long as they don’t approach excessive human-likeness. When a robot’s appearance enters the “uncanny valley” (nearly but not quite human) it tends to repulse rather than attract.
Two factors drive this: physical appearance and behaviour. A robot with friendly features that behaves in socially normative ways, maintaining appropriate gaze, respecting personal space, responding to cues, generally puts us at ease. Change those variables and reactions shift rapidly.
Real-world examples are plentiful. When NASA’s Perseverance rover deployed the Ingenuity helicopter on Mars, audiences around the world cheered for it as if it were a brave pet. Observers admitted their thoughts were basically “Omg look how cute it is, it’s doing such a good job,” despite knowing full well it’s metal and code. NASA cleverly tweets in the first person as its rovers, and we eat it up. People have celebrated robotic achievements and expressed genuine mourning at robotic “deaths” in patterns resembling responses to living entities.
Anthropomorphism can enhance engagement and cooperation, useful if the robot serves as a companion for the elderly or a tutor for children. But it raises ethical questions: Are we exploiting emotional bonds with machines? What happens when users feel genuine distress at a robot’s malfunction or demise?
The expectation gap
Nowhere is this tension clearer than in humanoid robot design.
An analysis of contemporary humanoid robots reveals a striking discrepancy between fictional portrayals and real-world implementations. Across eleven commercially available or near-commercial humanoid robots, the mean height is approximately 145 cm, well below the global adult human average of 169 cm. More than half fall below 160 cm.
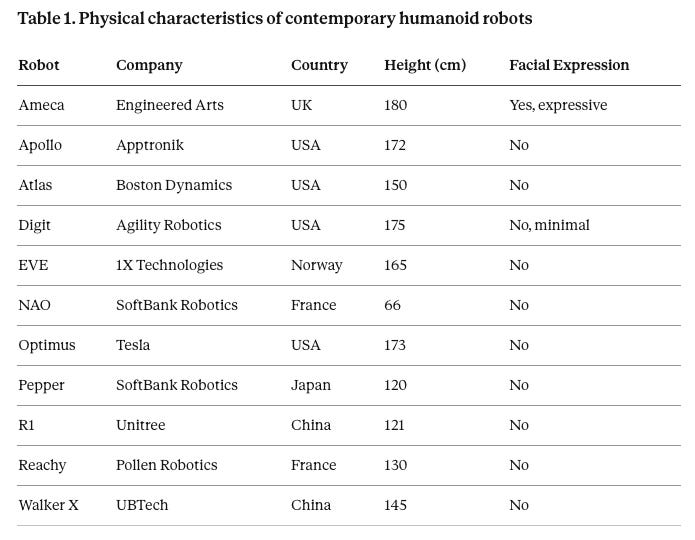
Note: Mean height = 145.2 cm; Median = 150 cm; SD = 34.2 cm. Average adult human height ≈ 169 cm.
More striking is the divergence in facial expressivity. Analysis of eighteen real-world humanoid robots reveals that only four (22%), Ameca, Nadine, Sophia, and EveR 6, possess expressive facial capabilities including the ability to smile. The remaining 78% feature either minimal, industrial, or absent facial expression systems.
This contrasts markedly with fictional humanoid robots in film and television (Table 2), where expressive faces predominate.
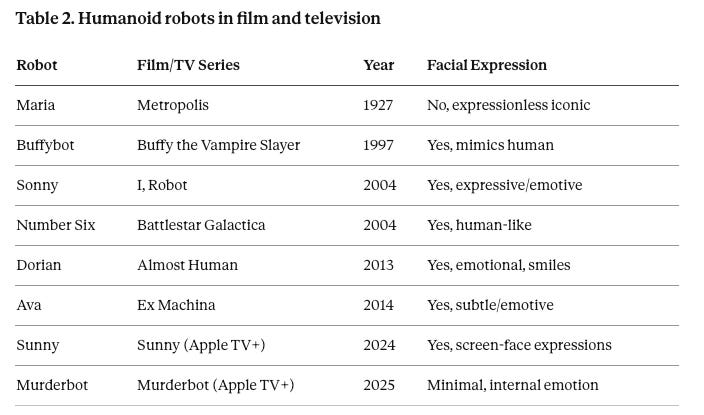
Note: 75% of fictional humanoid robots (6 of 8) feature expressive, emotive faces capable of smiling.
Public expectations of humanoid robots are substantially shaped by fictional portrayals featuring human-scale, emotionally expressive machines. When users encounter real robots that are notably shorter and facially inexpressive, the mismatch may impair social connection and trust formation. However, the gap also presents design opportunities: robots like Ameca demonstrate that sophisticated facial expressivity is technically achievable, while the success of smaller platforms like NAO and Pepper in therapeutic and educational contexts suggests that appropriate design for specific use cases may matter more than human-scale verisimilitude.
The invitation to interact
For human–robot collaboration to succeed, robots must signal their readiness for engagement in ways humans intuitively understand.
Physical robots use affordances and cues to invite interaction: a robot with friendly eyes and responsive body language invites people, especially children, to engage. Studies demonstrate that subtle design choices, a slight head tilt, blinking lights that mimic eyes, can dramatically increase people’s comfort in approaching a machine. The Amazon Echo’s blue light ring exemplifies this principle: it signals that the AI is listening and ready for input, transforming what might otherwise feel eerie into an intuitive invitation to speak.
As interaction paradigms become more abstract and generative, designers must build context-aware, emotionally intelligent invitations that align with how humans think, not merely how they click or command. The principle underlying these applications is that successful HRI depends not only on technical capability but on the quality of the invitation extended to users: the cues, affordances, and signals that bridge the communication gap between humans and intelligent systems.
Trust is not automatic
Effective human–robot collaboration depends on trust, but trust is not binary.
Research shows that trust in automation is shaped by perceived competence, integrity, benevolence, and predictability. Too little trust leads to disuse: users refuse to engage with capable systems or micromanage them, defeating the purpose. Too much trust produces dangerous complacency.
Semi-autonomous driving systems illustrate this vividly. Investigations into fatal accidents found that some systems were insufficient at maintaining driver engagement. They effectively invited over-trust, encouraging users to abdicate responsibility entirely. The system lulled humans into offloading all responsibility, sometimes with fatal results when it couldn’t handle an edge case.
Designing for appropriate trust requires transparency: robots must communicate what they are doing, why they are doing it, and what they will do next. It means giving users feedback and control so they feel in the loop, and designing robot behaviour to align with human social expectations.
Communication and common ground
Effective collaboration requires robust communication, but communication in HRI extends far beyond verbal commands.
It encompasses all modalities humans use among themselves: gestures, gaze patterns, non-verbal audio signals, visual displays, kinetic cues. Robots communicate through speech and text but also through physical actions that humans interpret inferentially. If a delivery robot parks itself by the door and flashes green lights, you infer it needs you to open the door.
Conversely, robots must interpret human cues beyond explicit instructions: vocal prosody, facial expressions, context. A truly fluent HRI system integrates linguistic and physical cues across all available sensory channels.
Consider the simple act of a human and robot moving a table together. The human might say “ready? lift now,” but they also rely on eye contact, head nods, or the subtle tug that indicates the robot has grasped it. For the robot to be a good partner, it must process those signals and respond in kind.
This requires building common ground: shared understanding of task parameters, role distributions, and participant states. When either party cannot accurately interpret the other’s intentions or status, collaboration fails.
Robots beyond the comfort zone
Extreme environments, places too dangerous, remote, or inaccessible for sustained human presence, offer some of the clearest insights into how HRI actually works. In these settings, robots are not conveniences; they are proxies. They act on human intent under conditions of delay, risk, and irreversibility.
Disaster response. In disaster zones, robots search collapsed structures, inspect nuclear facilities, and handle hazardous materials. Human operators supervise remotely, often under severe stress and with unreliable communication. Effective HRI here requires intuitive interfaces, clear status signalling, and systems that degrade gracefully when components fail.
Underwater exploration. Deep-sea environments parallel space in their hostility. Stanford’s OceanOneK humanoid robot demonstrates telepresence HRI through stereoscopic vision and haptic feedback. When OceanOneK descended to a 500-metre shipwreck, its operator reported experiencing realistic sensations of physical presence. He felt as if he personally touched objects at that depth. The human provided judgment and adaptability; the robot provided reach and resilience. Intelligence emerged from the partnership.
Mining. Robots perform sensing, cutting, and transport in hazardous environments, but humans remain essential for interpretation and judgment. Integrated remote operation centres allow humans to collaborate with autonomous fleets from safe locations hundreds of kilometres distant. When mining giant BHP faced a dangerously over-pressurised pipe underground, they deployed a remotely controlled robot that successfully cut the pipe while human experts supervised from outside the tunnel entrance. Automation didn’t remove responsibility. It relocated it.
Space exploration. Space is the paradigmatic extreme environment. Communication delays and irreversibility force reliance on trusted autonomy. The Ingenuity Mars Helicopter received pre-planned flight instructions but made autonomous micro-adjustments based on sensor data to maintain its trajectory. No human could joystick it in real-time with a 10+ minute communication delay. It succeeded precisely because humans could not intervene.
This sort of trusted autonomy will become increasingly common. The question shifts from “should it be autonomous or human-controlled?” to “how do we design autonomy that we can trust and verify?” and “how do we keep humans informed and able to intervene when possible?”
Centaur intelligence
A compelling model for human–robot collaboration emerged from chess.
When Garry Kasparov was defeated by IBM’s Deep Blue in 1997, it seemed to herald the obsolescence of human cognitive supremacy. Yet Kasparov didn’t abandon chess. He helped invent “centaur” or “freestyle” chess, in which players can use computers during games, tapping millions of previously played games to augment human decision-making.
This combination of human intuition and creativity with machine calculating power creates a formidable competitor. Experts agree that human-computer teams play better chess than either computers or humans alone.
The centaur model offers a powerful metaphor for HRI more broadly. In medical imaging, AI systems can outperform human doctors at identifying pathologies by analysing millions of images, yet doctors remain essential for contextual diagnosis, treatment design, and patient communication. In production logistics, research has demonstrated that mixed human-machine teams are more coordinated, more efficient, and have fewer accidents than either purely human or purely machine teams.
Modern machine capabilities (rapid computation, vast data ingestion) are almost complementary to the most sought-after human qualities: creativity, empathy, critical thinking, and emotional intelligence.
Realising centaur intelligence requires shifting organisational mindset from “them versus us” to “we.” This means redesigning work environments for teams inhabited by people, machines, and data; rethinking work rituals and norms to foster trust between machines and people; and helping machines interpret human movement, mood, and thought while responding with appropriate information or feedback.
Distributed cognition
The centaur model connects to a deeper theoretical framework: distributed cognition.
Developed by Edwin Hutchins in his foundational work on ship navigation, distributed cognition argues that cognitive processes are not confined to individual minds but are distributed across people, artefacts, and environments. Hutchins demonstrated how cognitive labour is shared among crew members and instruments, with the overall system exhibiting intelligent behaviour that no single component possesses independently.
Applied to HRI, this provides a powerful lens: rather than viewing robots as standalone tools, we can position human–robot teams as collective cognitive systems in which intelligence emerges from the interaction between human and machine components.
Humans excel at higher-level cognitive tasks: decision-making, reasoning, creativity, contextual judgment. Machines are better suited for lower-level tasks: computation, data processing, pattern recognition at scale. When combined effectively, humans and machines can distribute cognitive loads and achieve outcomes beyond either’s independent capability.
The challenge is integrating human capacities for empathy, intuition, and comfort with ambiguity alongside machine efficiency and consistency. Success depends not merely on the capabilities of individual components but on the quality of coordination and communication between them.
The Service Layer: Who Maintains the Machines?
The conversations about human–robot interaction tend to focus on the moment of encounter: the interface, the handoff, the collaboration. Less visible, but arguably more consequential, is what happens when things go wrong.
Every robot that enters a shared workspace eventually needs repair. Motors wear out. Sensors drift. Software requires patching. In extreme environments, the question becomes more urgent: dust infiltrates joints, thermal cycling stresses components, and there is no service technician within a thousand kilometres. Or, in the case of lunar operations, within 384,000 of them.
From a planetary science perspective, this is not a secondary concern. The viability of any permanent presence beyond Earth depends on solving the maintenance problem before we arrive. NASA’s current SBIR solicitations explicitly call for “robotic maintenance strategies” and “methods for robotic servicing” to be defined for lunar excavation systems expected to operate for five years in permanently shadowed regions at temperatures approaching 40 Kelvin. The question is not whether robots can dig regolith. The question is whether they can keep digging.
The maintenance layer is where the future of robotics will be won or lost. And at present, that layer barely exists.
The artisanal era
Today, robot maintenance operates much like luxury car servicing in the 1950s: highly specialised, vendor-specific, and expensive. Boston Dynamics services Spot. FANUC services FANUC arms. If you deploy a fleet of robots from multiple manufacturers, you need multiple service contracts, multiple spare parts inventories, and multiple relationships with technicians who may or may not be available when you need them.
This model works tolerably well when robots are rare and high-value. It breaks entirely when robots proliferate.
Roboworx, a US-based field service company, has built its business on a striking observation: many robot deployments fail within the first year – not because the technology is inadequate, but because maintenance gaps render machines “expensive paperweights.” Their solution is a vendor-agnostic service network that installs, maintains, and repairs robots across manufacturers, supported by fleet management software that provides OEMs with visibility into their deployed hardware.
In Europe, WAKU Robotics offers similar capabilities through its WAKU Care platform: predictive maintenance, remote diagnostics, multi-vendor service management. Bell & Howell in the US claims its remote monitoring centre can resolve issues in 60% less time than field calls. Boston Dynamics’ Orbit software lets operators monitor fleet health, schedule maintenance, and flag anomalies using vision-language models.
These are early moves toward what might become the service infrastructure for robotics at scale. But they remain fragmented, proprietary, and concentrated in controlled environments: warehouses, factories, logistics hubs. The harder problem lies elsewhere.
Extreme environments: design for autonomy
In underground mining, offshore installations, and space operations, the maintenance question becomes existential. You cannot dispatch a technician to a permanently shadowed crater on the Moon’s south pole. You cannot easily access a robot 2,000 metres below the ocean surface.
The lunar case is instructive because it makes explicit what remains hidden in terrestrial contexts. Communication delays of several seconds preclude real-time teleoperation; supervised autonomy becomes the only viable mode. Lunar regolith is extraordinarily abrasive, infiltrating seals and degrading mechanisms in ways that would trigger a service call on Earth but must be anticipated and designed around on the Moon. And the economics are unforgiving: every kilogram of spare parts launched from Earth costs thousands of dollars and months of planning.
This forces a different design philosophy. Three strategies have emerged:
Design for zero maintenance. NASA’s traditional approach: build systems so robust they never need repair, at least within mission duration. This works for short missions with finite lifespans. It does not scale to permanent infrastructure. The Mars rovers exceeded their design lifetimes spectacularly, but they were scientific instruments, not industrial systems expected to process tonnes of material continuously.
Modular design for field-swappable components. The International Space Station pioneered Orbital Replacement Units (ORUs): standardised modules that astronauts (or robots) can swap without specialised tools. NASA’s IPEx lunar excavator extends this principle, with modularity and commonality of parts reducing the need for bespoke repairs. The lesson from ISS is that modularity must be designed in from the start; retrofitting it is nearly impossible.
Robots maintaining robots. The logical endpoint. GITAI, a Japanese-American company, is developing robotic systems explicitly designed for “inspection, maintenance, upgrades, and disassembly” of lunar infrastructure. The Lunarminer framework for lunar water ice extraction, developed at the University of Adelaide, includes dedicated “maintenance points” in its swarm architecture where robots can receive repairs from peer systems. This is not science fiction: it is the baseline assumption for any serious ISRU (in-situ resource utilisation) architecture.
What makes these strategies transferable is that they address constraints that exist, in attenuated form, in terrestrial extreme environments. Underground mining faces access constraints and hazardous conditions. Offshore platforms face logistics costs and response times. The lunar case simply removes the option of sending a human when all else fails.
Table 3: The common thread: as environments become more extreme, the maintenance layer must become more autonomous. Human technicians become supervisors of repair processes rather than executors.

The platform question
Who will own the service layer?
In terrestrial robotics, the Robots-as-a-Service (RaaS) model is shifting the answer. Companies like Vecna Robotics and Bluewhite bundle maintenance into subscription pricing, transforming robot deployment from capital expenditure to operating expenditure. Under this model, the provider retains responsibility for uptime, repairs, and software updates. The customer pays for outcomes, not assets.
This is economically elegant, but it concentrates power. The entity that controls maintenance, diagnostics, and software updates has leverage over the entire ecosystem. AWS became more powerful than many companies running on its infrastructure precisely because it controlled the operational layer that others depended on.
For robots, the stakes may be higher. A service platform with visibility into millions of deployed robots, their locations, their sensor data, their failure modes, accumulates a strategic asset that no individual manufacturer possesses. Predictive maintenance algorithms trained on that data become competitive moats. Integration with enterprise systems creates lock-in.
The terrestrial pattern suggests consolidation: not a fragmented network of independent technicians, but a small number of platforms that aggregate demand, standardise interfaces, and capture the data exhaust of robotic operations at scale.
For space operations, the question is different but no less consequential. The service layer for lunar infrastructure will likely be built by the same entities building the infrastructure itself: NASA and its contractors, commercial lunar operators, and eventually whoever establishes the first permanent facilities. The maintenance architecture will be baked into the design of lunar systems from the outset. The decisions being made now in ISRU system design, about modularity, commonality, and robotic serviceability, will determine the operational constraints of lunar industry for decades.
Implications for human–robot interaction
The quality of maintenance determines whether robots remain trustworthy over time or degrade into unreliable nuisances. It shapes who has visibility into robot behaviour and who can modify it. It determines whether expertise remains distributed among human technicians or becomes encoded in platforms that operate at scale.
If the future of work involves collaboration with robotic systems, the future of that collaboration depends on who keeps those systems running – and on whose terms.
The design decisions being made now, in the maintenance architectures of early robot deployments, will cement into the infrastructure that shapes human–robot relationships for decades.
The near term
The most important developments in HRI are not speculative and the near term is where the consequential choices are being made.
Large language models are accelerating the convergence between human and robot cognition, enabling robots to interpret natural language, infer intent, and engage in dialogue rather than command–response interaction. Researchers have connected language models to humanoid robots, allowing them to understand conversational commands like “pretend to be a ghost” and translate them into complex sequences of actions without explicit programming for each motion. As AI models gain multimodal abilities across vision, speech, and reasoning, robots will better comprehend context and exhibit rudimentary common sense. But these systems need careful alignment with human values to ensure their decisions in physical tasks remain safe.
The near future of HRI will be shaped not by dramatic breakthroughs, but by countless design decisions being made now: how autonomy is allocated, how trust is calibrated, how responsibility is shared.
These decisions will harden into infrastructure, policy, and habit before most people notice they were made.
A future already underway
Human–robot interaction has moved beyond novelty. Robots are becoming participants in human systems, sometimes quietly, sometimes controversially.
The question is no longer whether humans and machines will work together. They already do.
The real question is how thoughtfully we choose to shape that collaboration, in the near term, while the future is still malleable. The technologies we develop reflect and challenge our understanding of human nature. Our behaviours, biases, and aspirations become visible in the mirror of our mechanical creations.
Central questions remain: How do we calibrate appropriate trust? How do we design communication systems that achieve genuine mutual comprehension? How do we allocate autonomy appropriately while maintaining meaningful human control? How do we ensure that the benefits of human–robot collaboration are distributed equitably and that robotic systems reflect our best values rather than our biases?
Answering these questions will shape both technological development and the societies in which these technologies operate.
References
Ashraf, M., van Zyl, J. M., Mainza, A. N., Karamozov, S., & Lamberg, P. (2024). Integrated and intelligent remote operation centres (I2ROCs). Resources Policy, 88, 104443.
Australian Remote Operations for Space and Earth (AROSE). (2022). Robotics in underground mining.
Blank, J. G. (2025). Human–Robot Partnerships Will Enable Future Exploration & Development Activities on the Moon. 76th International Astronautical Congress.
Blank, J. G., et al. (2021). Autonomous mapping and characterization of terrestrial lava caves using quadruped robots. 72nd International Astronautical Congress.
Cassidy, M. (2014). Centaur chess shows power of teaming human and machine. HuffPost.
Goodrich, M. A., & Schultz, A. C. (2007). Human–robot interaction: A survey. Foundations and Trends in Human–Computer Interaction, 1(3), 203–275.
Howe, A. S., et al. (2020). Maintenance-Optimized Modular Robotic Concepts for Planetary Surface ISRU Excavators. NASA Technical Reports.
Hutchins, E. (1995). Cognition in the Wild. MIT Press.
Klumpp, M., et al. (2019). Production logistics and human–robot cooperation. International Journal of Production Research, 57(7), 2209–2226.
Lee, J. D., & See, K. A. (2004). Trust in automation. Human Factors, 46(1), 50–80.
Mori, M. (1970). The uncanny valley. Energy, 7(4), 33–35.
Mueller, R. P., et al. (2023). Lunar Mining and Processing: Responsible ISRU. AIAA ASCEND 2023.
NASA SBIR. (2024). Lunar Surface Excavation: Subtopic solicitation for icy regolith excavation technologies. SBIR.gov.
Pham, H., et al. (2024). Lunarminer Framework for Nature-Inspired Swarm Robotics in Lunar Water Ice Extraction. Biomimetics, 9(11), 680.
Rajani, R. (2022). Human–robot interaction [Keynote].
Rajani, R. (2025). An invitation to interact. Substack.
Walsh, D. (2025). Preventative Maintenance for Robots in the Field. Automation World.
This essay appears in The Near Term, a collaborative Substack by Rakhi Rajani and Jen Blank focused on technologies and systems already reshaping how humans and machines live and work together.